本文档是基于Openbot官网DIY版本的补充说明资料
一、套件组装完成效果:

二、部件连接图示及步骤:
1、将线连接到电动机
2、将两个电动机的正极和负极引线插入L298N板的OUT1(+)和OUT2(-)
3、将其他两个电动机的正极和负极引线插入L298N板的OUT4(+)和OUT3(-)
4、用4个M3x4螺钉安装L298N,用8个M3x25螺钉和螺母安装电动机。
5、(可选)安装超声波传感器和LED
6、插入手机支架的顶部并安装弹簧或橡皮筋
7、使用两个M3x25螺钉和螺母将手机支架的底部安装到顶板上
8、用一颗M2.5x10螺钉和螺母安装速度传感器
9、用M2.5x6螺钉安装电池盒
10、插入电源开关
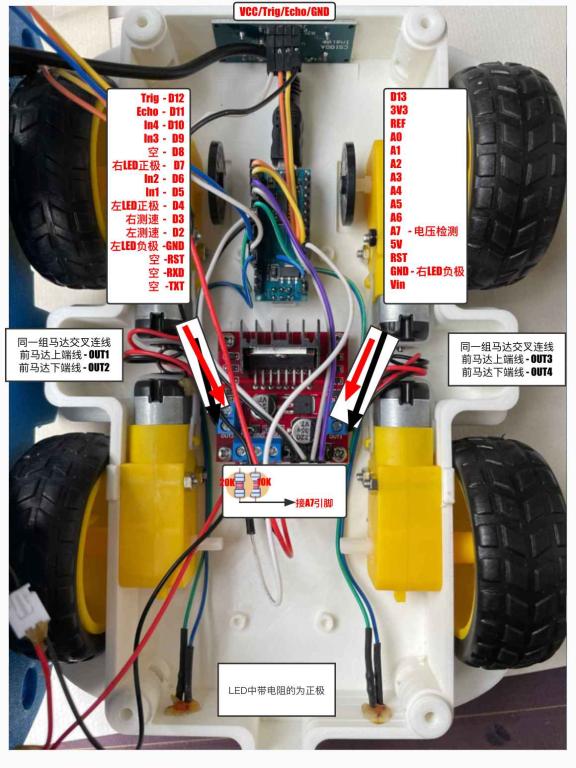
11、将L298N的PWM输入连接到Arduino的引脚D5,D6,D9和D10
12、将速度传感器和超声波传感器连接到5V和GND
13、将速度传感器的D0连接到Arduino的D2引脚(左)和D3(右侧)
14、将超声波传感器的回声和触发器连接到Arduino的D11和D12引脚
15、将USB电缆连接到Arduino,并将其穿过顶盖
16、(可选)将LED连接到Arduino和GND的D4引脚(左)和D7引脚(右)
17、(可选)将分压器连接至Arduino的A7引脚
18、将电池电缆连接至L298N的Vin。
19、将六个M3螺母插入底板孔中,然后用六个M3x25螺钉安装顶盖(注意:将车身平放操作,先对准空位轻放上盖板,轻旋螺钉,依次操作待所有螺丝已旋进底板的螺母中后,卡紧卡扣)
20、安装车轮
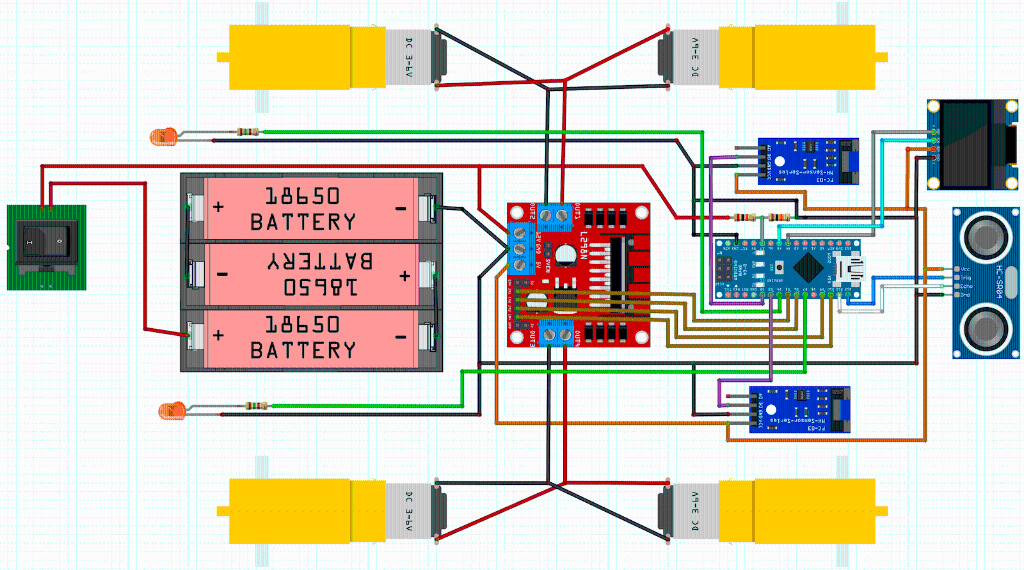
三、实际接线:
1、马达接线图:

2、小车底盘内部接线图示:
三、注意事项:
1、盖板螺丝安装过程要平放,尽量不要出现震动,否则底板孔中螺丝可能掉出,而需拆分重放!
2、调试马达驱动时,建议不要安装车轮;超声波前方遮挡时(相当于检测到碰撞),小车前进无效,这一点注意;
3、烧写固件时,务必关闭主电源;
Copyright © 2015 - 2016 DISPACE.NET | 使用帮助 | 关于我们 | 投诉建议